
Социальные сети
Последние темы
» Неоднозначный Иранавтор #$%& Сегодня в 11:02
» Достижения Роzzии
автор Night Вчера в 23:27
» Реальная ситуация в Украине
автор Night Вчера в 19:36
» Homo sovieticus
автор Night Вчера в 18:45
» ЛДНР. Жертва не сделанного оборта
автор Night Вчера в 18:37
» Свидетели "СВО"
автор Night Вчера в 18:35
» Идея и правила
автор Night Вчера в 18:21
» Глубинный народ
автор Night Вчера в 18:18
» Плеяда идиотов!
автор Night Вчера в 18:07
» Приказ МИДу Российской Федерации об увольнении гр. Лаврова и гр. Захаровой
автор Night Сб Май 18 2024, 18:23
» Биньямин Нетаньяху, ХАМАС. Израиль Палестина
автор Night Сб Май 18 2024, 18:21
» Братья на век!
автор Night Сб Май 18 2024, 18:16
» На кого работает Путин?
автор Andrii1973 Пт Май 17 2024, 17:55
» Геноцид россиян
автор #$%& Чт Май 16 2024, 19:47
» Илан Шор, Победа, Молдова, Россия
автор Night Чт Май 16 2024, 14:04
Сверхточный робот для внутриклеточной микроманипуляции
Участников: 4
Страница 1 из 1

Сверхточный робот для внутриклеточной микроманипуляции
автор Night Ср Янв 29 2020, 22:05
Ученые из Краковского университета науки и техники AGH создали одного из самых точных роботов в мире
Он настолько точен, что им можно манипулировать в нервных клетках человека и животных.
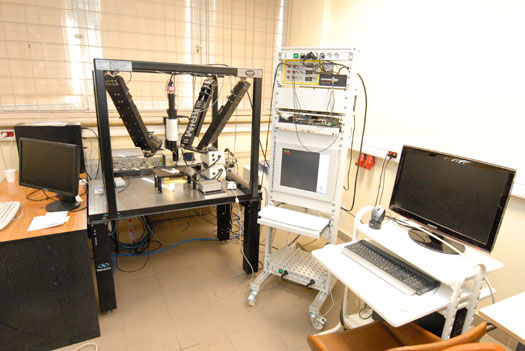
Проектирование и изготовление устройства заняло более 3 лет. Робот - это гибрид. Он состоит из двух частей: макро и микро робот. Целое напоминает четвероногого паука. Макро часть предназначена для поиска исследуемой клетки, а микро часть - с иглой - приспособлена для манипуляций внутри клетки. Управляемое компьютером устройство занимает площадь около 3 м2 и очень тяжелое. Благодаря этому он ударопрочен, а его движения могут быть медленными и точными.
Сверхточный робот AGH
Робот оснащен системами видения, работающими в качестве источника обратной связи для управления устройством. Робот состоит из параллельного макроманипулятора с четырьмя режимами работы, с последовательным микроманипулятором с прикрепленными к нему тремя режимами, гибких шарнирных соединений, приводимых в движение пьезоэлектрическими приводами, которые точно перемещают инструменты, и камер с макроскопической оптической системой с большим увеличением. Благодаря уникальному алгоритму обработки изображений можно воспроизводить информацию в трех измерениях, надежно перемещать инструмент вокруг и внутри ячейки и в течение длительного времени стабилизировать относительное положение ячейки и инструмента.
Разделенные во времени макро- и микрооперации позволили устранить вибрации и электромагнитные помехи от макроманипулятора, двигатели которого отключаются во время микроманипуляции. Использование параллельного макроманипулятора позволяет легко и свободно выбирать область ткани, в которой проводятся эксперименты, и намного проще, чем в существующих решениях, заменять и обслуживать биологические инструменты и препараты. Использование макроскопической оптической системы увеличило расстояние линзы от образца на порядок, оставляя большое пространство для манипуляций. Основа макроманипулятора (рама) позволяет строить клетку Фарадея.
Робот сконструирован таким образом, чтобы после добавления второго микроманипулятора можно было проводить биологические эксперименты, такие как, например, исследование поведения клеток, культивируемых in vitro, после внутриклеточной инъекции веществ, которые стимулируют и ингибируют их развитие. Для этого необходимо, чтобы соответствующая ячейка находилась в растворе, а область поиска правой ячейки значительно превышала пространство для надлежащих манипуляций и поле зрения стационарного микроскопа. Затем локализованная клетка захватывается одной микропипеткой для иммобилизации, а другая - микропипеткой, через которую осуществляется инъекция, точно проникает через клеточную мембрану, чтобы как можно меньше повредить ее, и после точной инъекции извлекается. Этот метод также может быть использован для замены выбранных элементов внутренней части ячейки, например, ядра или цитоплазмы, которая применяется, среди прочего в генной инженерии и искусственном оплодотворении.
AGH гибридный робот
Параллельный робот с инновационной кинематической структурой характеризуется наличием аналитического решения простой и обратной кинематической задачи, высокой точностью и разрешением позиционирования, низким уровнем генерируемых электромагнитных помех и хорошим гашением вибрации. Оригинальный дизайн микроробота обеспечивает высокую точность движений в относительно большом рабочем пространстве и очень хорошее демпфирование вибрации. Генераторы и средства управления траекторией были разработаны для обоих роботов, обеспечивая необходимую точность отслеживания и позиционирования траектории. Информация об относительном положении инструмента и объекта манипуляции (ячейки) приходит от оптической системы, которая включает макроскопический оптический кабель с контролируемыми параметрами и камеру высокого разрешения.
На основе разработанной методологии в системе FPGA реализованы алгоритмы управления и обработки изображений, что позволяет обрабатывать и осуществлять управление в режиме реального времени. Робот оснащен специальным, интуитивно понятным человеко-машинным интерфейсом в виде панели оператора, оснащенной сенсорным экраном, позволяющим выбирать операции, изменять параметры и осуществлять непрерывный предварительный просмотр манипуляций, выполняемых путем отображения обработанного изображения с камеры.
По словам профессора Тадеуша Уля, руководителя отдела робототехники и мехатроники AGH, создателя супер робота, это самое точное устройство в мире, и его применение в первую очередь - молекулярная медицина. Рабочее пространство машины составляет несколько микрометров, а разрешение ее движений составляет нанометры. Устройство было разработано для манипуляций внутри клеток. Он способен осматривать и лечить клетки, стимулировать их напряжением, не разрушая живые ткани. В будущем это может помочь в борьбе с раком.

Night- Творец

- Сообщения : 1646
Unit token : 2875
Reputation : 420
Дата регистрации : 2019-08-15
Возраст : 26
Откуда : Украина -

Re: Сверхточный робот для внутриклеточной микроманипуляции
автор Барбарискин Вт Фев 04 2020, 00:07
Не думал, что поляки настолько развитые в этом плане... Даже удивлен как то, озадачили.... Небось как наши, разработать могут, а это никому не нужно оказывается и в серию не пускают

Барбарискин- Монах

- Сообщения : 75
Unit token : 81
Reputation : 6
Дата регистрации : 2020-01-15
Возраст : 33
Откуда : Russia
Re: Сверхточный робот для внутриклеточной микроманипуляции
автор mikeadams714 Сб Мар 21 2020, 19:33
Базаришь! Даже не верится. Это получается, они могут даже на мозге операции проводить. И нигде об этом ничего не слышно. Американцы наверно выкупят, если правда и потом как американскую компанию представят. То что это поляки сделали никого волновать не будет уже.Барбарискин пишет:Не думал, что поляки настолько развитые в этом плане... Даже удивлен как то, озадачили.... Небось как наши, разработать могут, а это никому не нужно оказывается и в серию не пускают
mikeadams714- Боевой Монах

- Сообщения : 126
Unit token : 133
Reputation : 7
Дата регистрации : 2020-02-14
Re: Сверхточный робот для внутриклеточной микроманипуляции
автор Профессор Бухлов Чт Мар 26 2020, 18:13
Написать можно все что угодно. А в работе они никакие оказались. Может быть, как вариант, не знаю. Не просто же так это не используется.mikeadams714 пишет:Базаришь! Даже не верится. Это получается, они могут даже на мозге операции проводить. И нигде об этом ничего не слышно. Американцы наверно выкупят, если правда и потом как американскую компанию представят. То что это поляки сделали никого волновать не будет уже.Барбарискин пишет:Не думал, что поляки настолько развитые в этом плане... Даже удивлен как то, озадачили.... Небось как наши, разработать могут, а это никому не нужно оказывается и в серию не пускают

Профессор Бухлов- Палач или Спаситель?

- Сообщения : 820
Unit token : 1024
Reputation : 82
Дата регистрации : 2019-08-14
Возраст : 26
Откуда : Калининград
» Робот - медсестра. США
» Робот-ленивец. США
» Робот или сотрудник?
» Робот трамвай в Польше
» Робот грузчик. США
» Робот-ленивец. США
» Робот или сотрудник?
» Робот трамвай в Польше
» Робот грузчик. США
Страница 1 из 1
Права доступа к этому форуму:
Вы не можете отвечать на сообщения